

Viser:让3D可视化在Python中触手可及的革命性工具
“
还在为复杂的三维数据可视化头疼吗?本文带你深入解析2025年最新开源项目Viser,了解它如何通过Web化架构和极简API设计,让计算机视觉和机器人领域的3D可视化变得前所未有的简单高效。
一、为什么需要Viser?
在计算机视觉和机器人领域,3D可视化就像科学家的”第三只眼”。当我们需要调试SLAM算法、观察神经网络训练过程,或是验证机器人运动规划时,实时、交互式的三维可视化能极大提升研发效率。
传统方案往往面临两难选择:
-
轻量级库(如Matplotlib/PyVista):简单易用但功能有限 -
专业工具(如Unity/Maya):功能强大但学习曲线陡峭
而Viser通过创新设计,完美平衡了这两者的优势。

二、Viser的三大核心能力
1. 浏览器即视口的Web架构
Viser的Web-based Viewer设计彻底改变了传统可视化流程:
# 传统方案需要安装OpenGL驱动
# Viser只需浏览器即可运行
scene.add_point_cloud("/points", points=point_data, colors=color_data)
优势对比:
| 特性 | Viser | 传统方案 |
|---|---|---|
| 跨平台支持 | ✅ 浏览器即可访问 | ❌ 依赖本地环境 |
| 远程协作 | ✅ 共享URL即可 | ❌ 需文件传输 |
| 实时更新 | ✅ 自动同步状态 | ❌ 需手动刷新 |
| 嵌入网页 | ✅ 静态页面集成 | ❌ 复杂配置 |
“
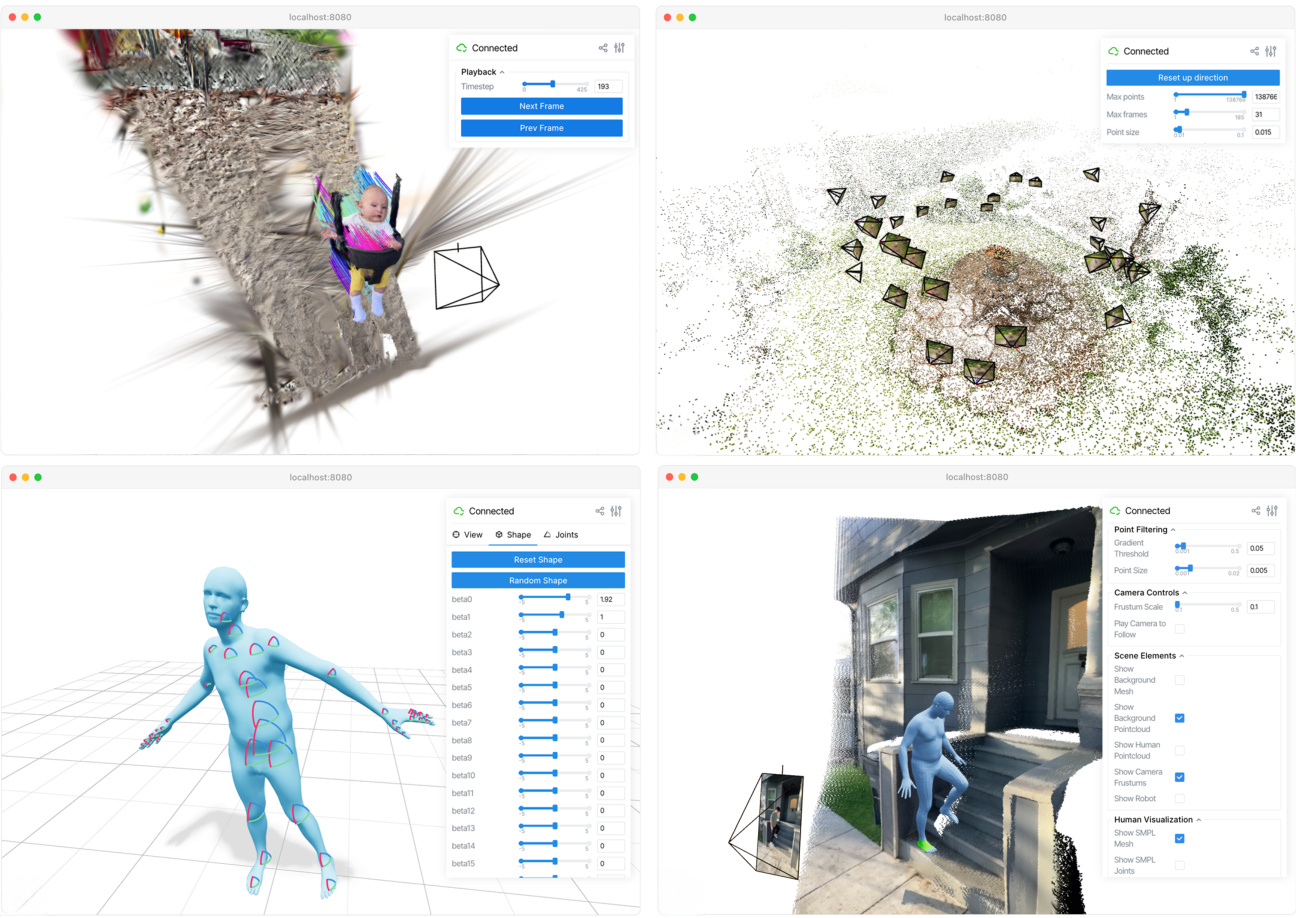
实际案例:论文《Shape of Motion》[citation:21] 使用Viser将4D重建结果嵌入项目主页,访客无需安装任何软件即可交互查看动态场景。
2. 场景构建的瑞士军刀
Viser提供了超过20种基础3D元素,满足从简单到复杂的可视化需求:
# 坐标系统可视化
scene.add_coordinate_frame("/base", length=0.5)
# 动态点云流
scene.add_point_cloud("/lidar", points=point_stream, colors=color_map)
# 物理仿真
scene.add_mesh("/robot",
path="robot.glb",
material=Material(metallic=0.8, roughness=0.2))
支持的元素类型:
-
几何体:立方体/球体/圆柱体等基础形状 -
传感器:相机视锥/雷达扫描线 -
动态数据:流式点云/轨迹线 -
高级格式:直接加载GLB/glTF模型

3. 即时交互的GUI系统
通过声明式语法快速构建专业级控制面板:
gui.add_folder("Camera Controls")
gui.add_vector3("Position", initial=[0,0,2])
gui.add_slider("FOV", min=10, max=90, step=1)
gui.add_button("Reset View", callback=reset_view)
交互控件支持:
-
基础控件:按钮/滑块/复选框/文本框 -
高级控件:颜色选择器/文件上传/进度条 -
信息展示:Markdown/Plotly图表/实时通知

三、革命性的命令式API设计
1. 传统声明式 vs Viser命令式
传统可视化库多采用声明式编程:
# 声明式示例(类似Gradio)
with ui.tabs("Camera"):
with ui.panel():
ui.slider("FOV", 10, 90)
Viser采用更直观的命令式风格:
# Viser命令式API
gui.add_folder("Camera")
slider = gui.add_slider("FOV", 10, 90)
slider.value = 60 # 实时修改
核心区别:
| 特性 | 命令式(Viser) | 声明式(传统) |
|---|---|---|
| 状态管理 | ✅ 显式控制 | ❌ 隐式管理 |
| 实时更新 | ✅ 属性直接修改 | ❌ 需重新渲染 |
| 复杂逻辑 | ✅ 自由控制流程 | ❌ 受框架限制 |
“
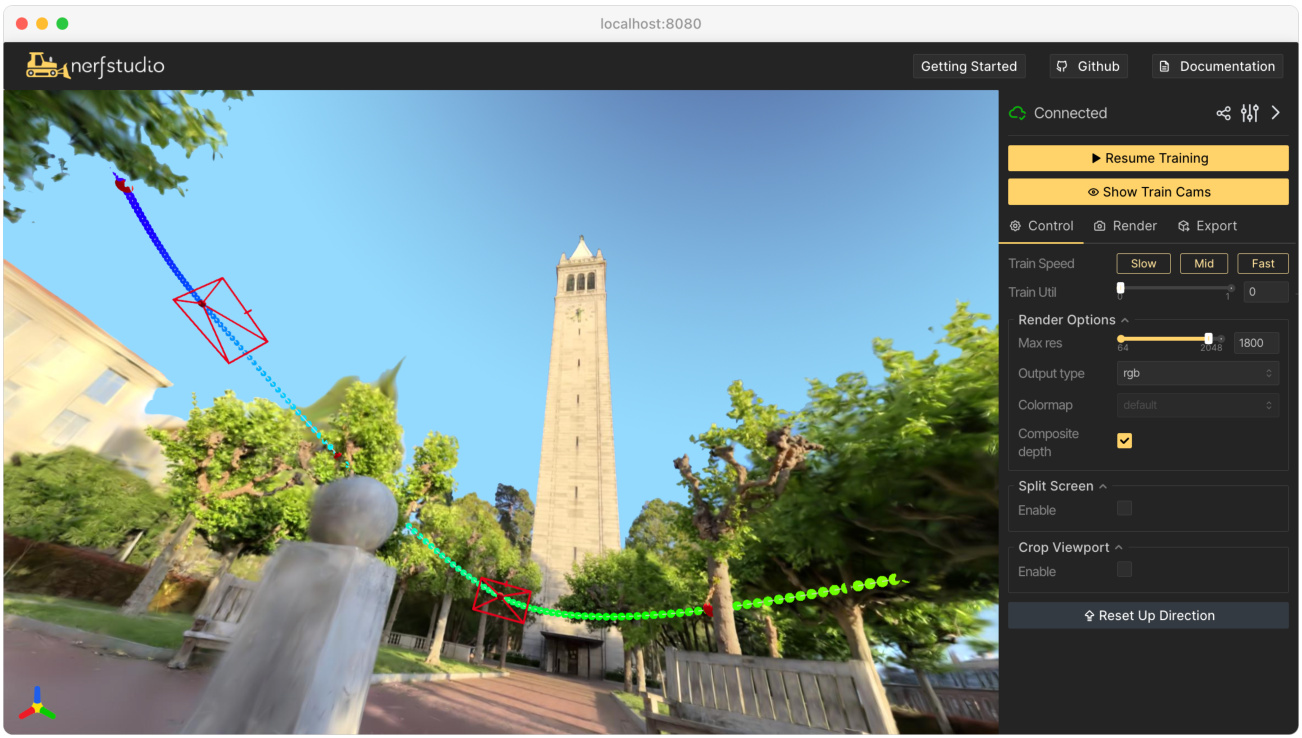
实际案例:论文《Nerfstudio》[citation:11] 使用Viser构建训练控制面板,通过实时修改学习率等参数观察训练效果。
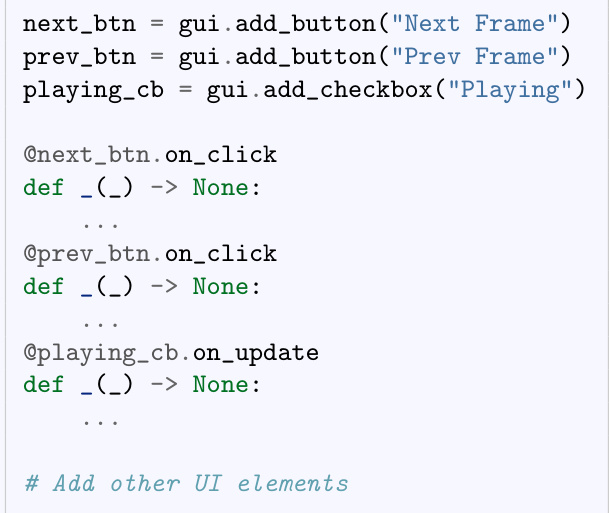
2. 事件驱动的交互模式
通过Python装饰器轻松处理用户交互:
@scene.on_click("/robot")
def handle_robot_click(event):
print(f"点击位置: {event.position}")
robot.set_color(255,0,0) # 点击后变红
支持的事件类型:
-
鼠标事件:点击/悬停/拖拽 -
视图事件:视角变化/缩放 -
生命周期事件:加载/卸载
四、架构设计的工程智慧
Viser采用四层架构实现高性能可视化:
客户端浏览器
│
WebSocket协议
│
传输层(消息批处理/压缩)
│
Python API
性能优化技术:
-
WebSocket消息批处理 -
TypeScript类型自动生成 -
WebAssembly加速计算 -
增量状态同步机制


五、典型应用场景
1. 计算机视觉
应用方向:
-
神经辐射场可视化(NeRF) -
4D场景重建 -
相机位姿分析
“
案例:论文《VideoMimic》[citation:25] 使用Viser实时可视化人体运动捕捉数据。
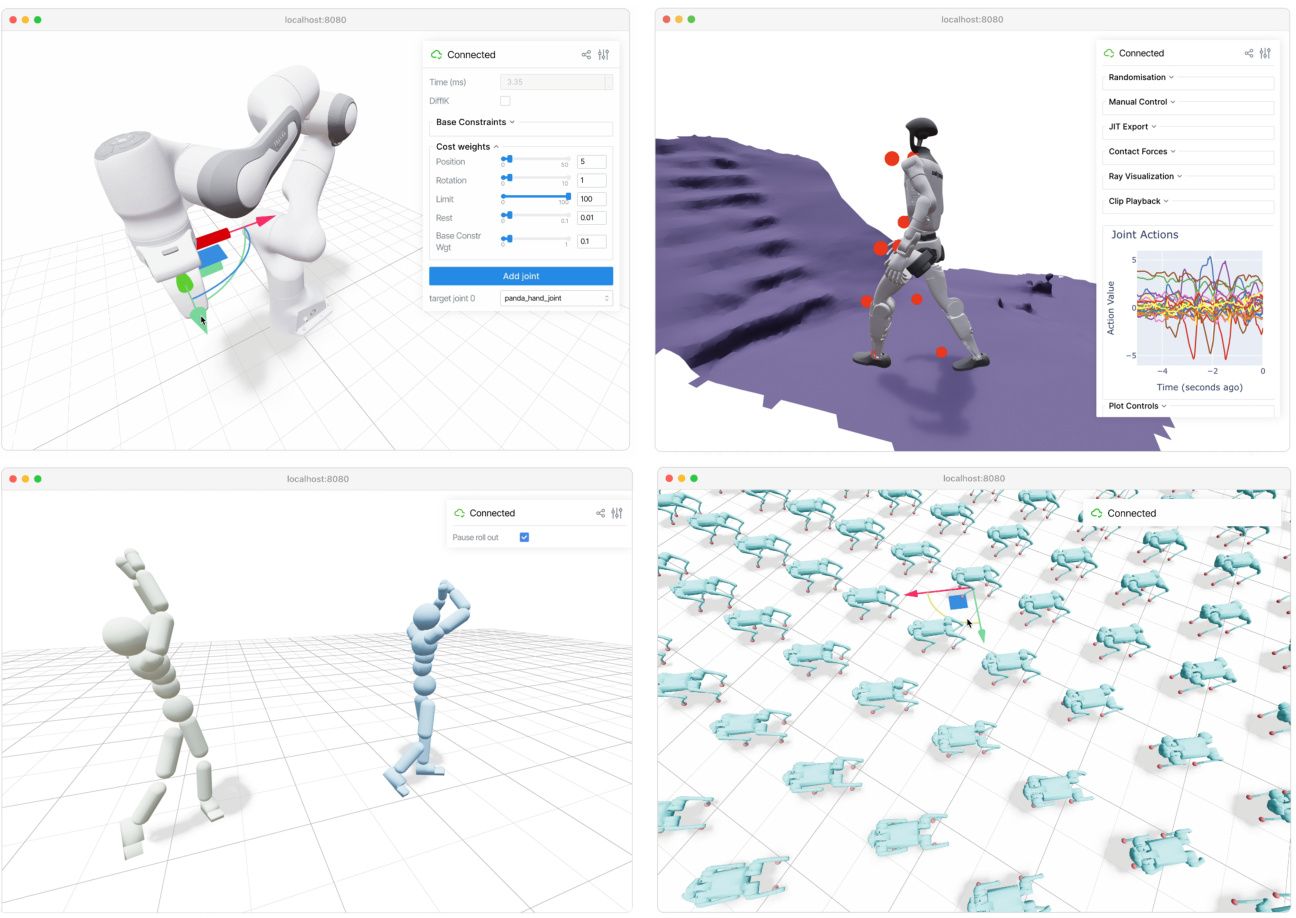
2. 机器人
典型用例:
-
逆运动学求解器 -
强化学习策略可视化 -
多机器人仿真
六、快速开始指南
1. 安装部署
pip install viser
2. 基础示例
from viser import ViserServer
server = ViserServer()
scene = server.scene
# 添加坐标系统
scene.add_coordinate_frame("/origin")
# 添加网格平面
scene.add_grid("/grid",
width=10,
height=10,
divisions=10)
# 添加相机视锥
scene.add_camera_frustum("/camera",
fov=60,
aspect=1.33,
position=[2,0,1])
# 启动服务
server.serve()
运行后自动打开浏览器: http://localhost:8080
3. 进阶技巧
动态数据更新:
import time
@server.on_frame
def update():
t = time.time()
points = np.array([[np.sin(t), np.cos(t), 0]])
scene.add_point_cloud("/wave", points=points)
七、常见问题解答
Q: Viser适合大规模点云可视化吗?
A: 支持百万级点云,通过LOD优化保持流畅。
Q: 如何处理实时传感器数据?
A: 使用add_point_cloud_stream接口,支持10Hz以上更新。
Q: 能否集成现有3D模型?
A: 支持GLB/glTF格式,直接加载Blender导出的模型。
Q: 性能瓶颈在哪些场景?
A: 超复杂材质光照场景建议简化Shader。
八、未来展望
Viser团队计划在2025年实现:
-
分布式渲染支持 -
自动标注工具链 -
ROS2深度集成
总结
Viser通过Web架构+命令式API的创新组合,为Python开发者提供了专业级的3D可视化能力。无论是学术研究还是工业应用,它都将成为连接数字世界与物理世界的关键工具。
本文基于Viser技术文档[citation:1-90]编写,完整代码示例和最新进展请访问官方仓库

